
扩展单元:定位扩展单元

特点
- 可与步进电机和伺候连接,可根据脉冲串(最大2Mpps)输出,进行定位控制或速度控制。
- 每1台扩展单元可以进行2轴控制。(无插补功能)
- 每1台基本单元可最多扩展2台(也可与标准I/O扩展单元组合)。
- 2轴合计可存储256个运行信息,每1轴可将这些信息组合到499个进行连续运行。
- 通信协议采用Modbus RTU协议。如果有支持Modbus RTU的主站,即使没有基本单元,定位扩展单元也可运行。
- 备有易设定各种参数的工具。

注:定位扩展没有基本单元,定位扩展单元也可运行。 另外不能使用2008年3月以前生产的基本单元。
功能规格
| 项目 | 规 格 | |
| 轴数 | 2轴 | |
| 最大速度 | 2M脉冲/s | |
| 定位系统 | 移动方式 | (1) 绝对值+增量式 (2) 增量式 |
| 位置转移 | 线形、旋转 | |
| 定位指令单位 | 脉冲、µm、英寸、度、用户指定单位 | |
| 速度指令范围 *1 | 1 ~ 2M脉冲/s | |
| 加减速 | 直线加减速、S型曲线加减速 | |
| 停留时间 | 0 ~ 32,768ms (1ms単位 ) | |
| 加减速度 *2 | 1 ~ 50,000,000 (脉冲/s2、µm/s2、英寸/s2、度/s2、用户指定单位/s2 ) |
|
| 间隙校正 | 0 ~ 65,535 (脉冲、µm、英寸、度、用户指定单位) |
|
| 范围 | +2,147,463,647 ~ -2,147,463,648脉冲 | |
| 脉冲输出方法 | (1) 脉冲串 [ CW / CCW ] (2) 时钟+方向信号 [ CK/方向 ] |
|
| 脉冲输出方法 | 线驱动输出 | |
| 定位数据 | 可存储的数据 | 256 |
| 设定方法 | PLC、个人电脑编写的程序 | |
| 运行模式 | 自动运转、手动运转 | |
| 远点复归功能 | 任意原点复归、低俗原点复归、高速原点复归1(OFF边沿停止)、高速原点复归2(Z相停止) | |
| 手动(JOG)运转 | 手动输入信号或根据指令进行脉冲输出 | |
| 自动运转 | 根据登入在PLC的文件数据进行脉冲输出 | |
| 通过外部输入进行速度变更功能 | 1 ~ 100% (速度、1%单位) | |
| I/O 分配 | 字X 8W / 字 8W (定位扩展单元使用扩展单元的2台的分配) |
|
| 通信功能 *3 | 协议 | Modbus RTU |
| 传递速度 | 9,600、19,200、57,600、115,200bps | |
*1 速度由对应共通参数设定的 [最高速度] 的最小单位决定。
*2 速度由对应共通参数设定的 [最高速度] 的最小单位决定。
*3 如要通信,需要基本单元(20/40/64点型)用通信选件板。将其安装到定位单元后进行使用。
定位扩展单元的I/O No.(输入输出存储器)有以下4种形式。
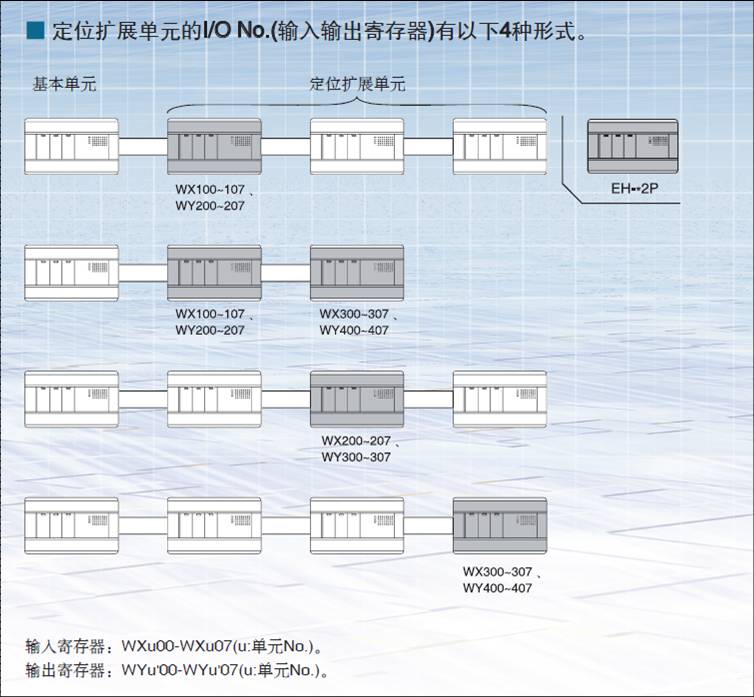
| 输入寄存器 | WXu00 - Wxu07(u:单元No.) |
| 输出寄存器 | WYu'00 - WYu'07(u:单元No.) |